
 Продукция
Продукция
Порядка 70% потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
- частота напряжения;
- число пар полюсов;
- величина напряжения;
- добавочное сопротивление в цепи ротора;
- вентильный каскад.
Изменяемые параметры для ДПТ:
- напряжение питания;
- сопротивление цепи обмотки якоря;
- магнитный поток.
Методы регулирования частоты вращения электродвигателя
Далее мы подробно рассмотрим эти способы и их применимость к различным типам электродвигателей.
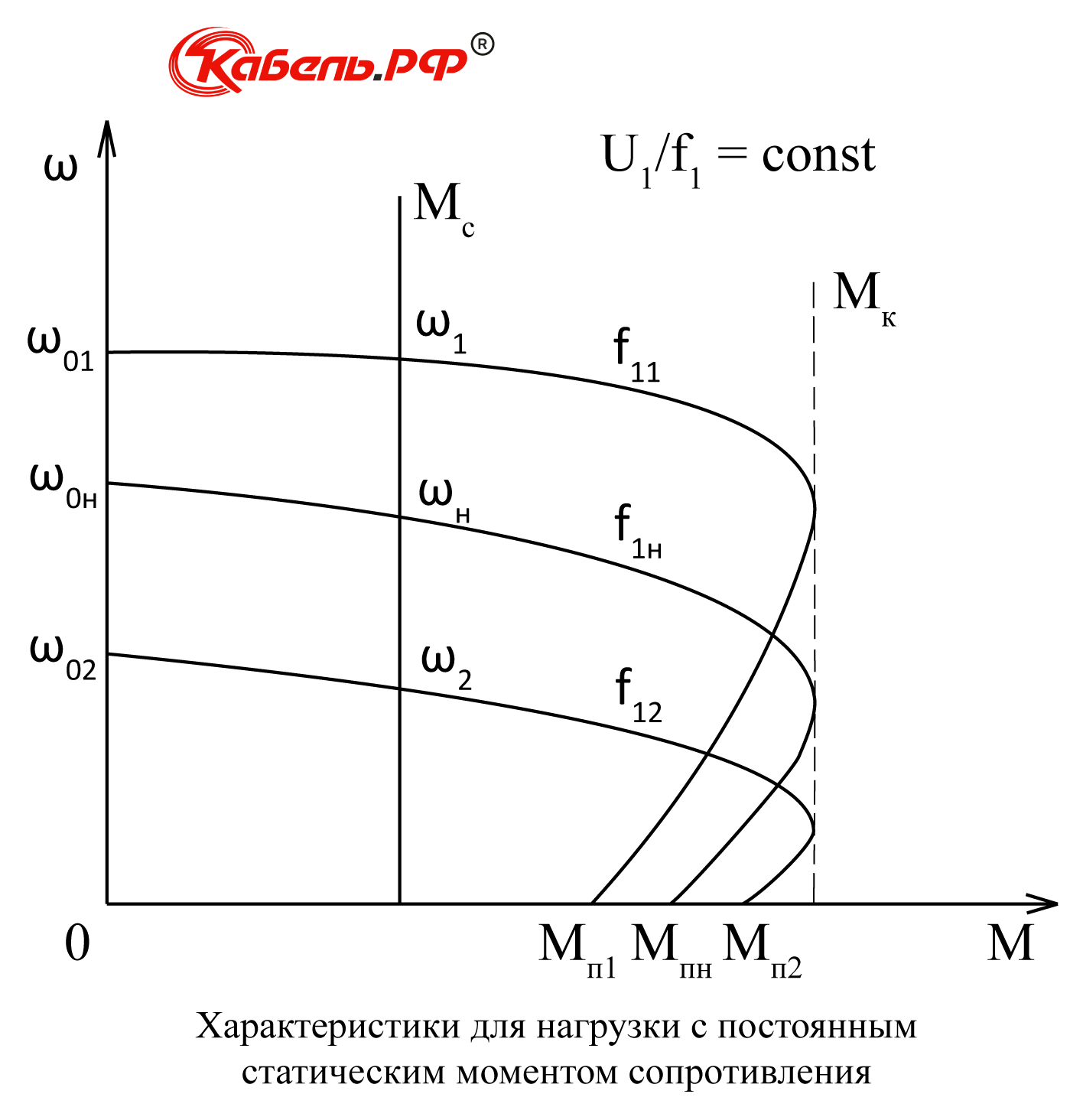
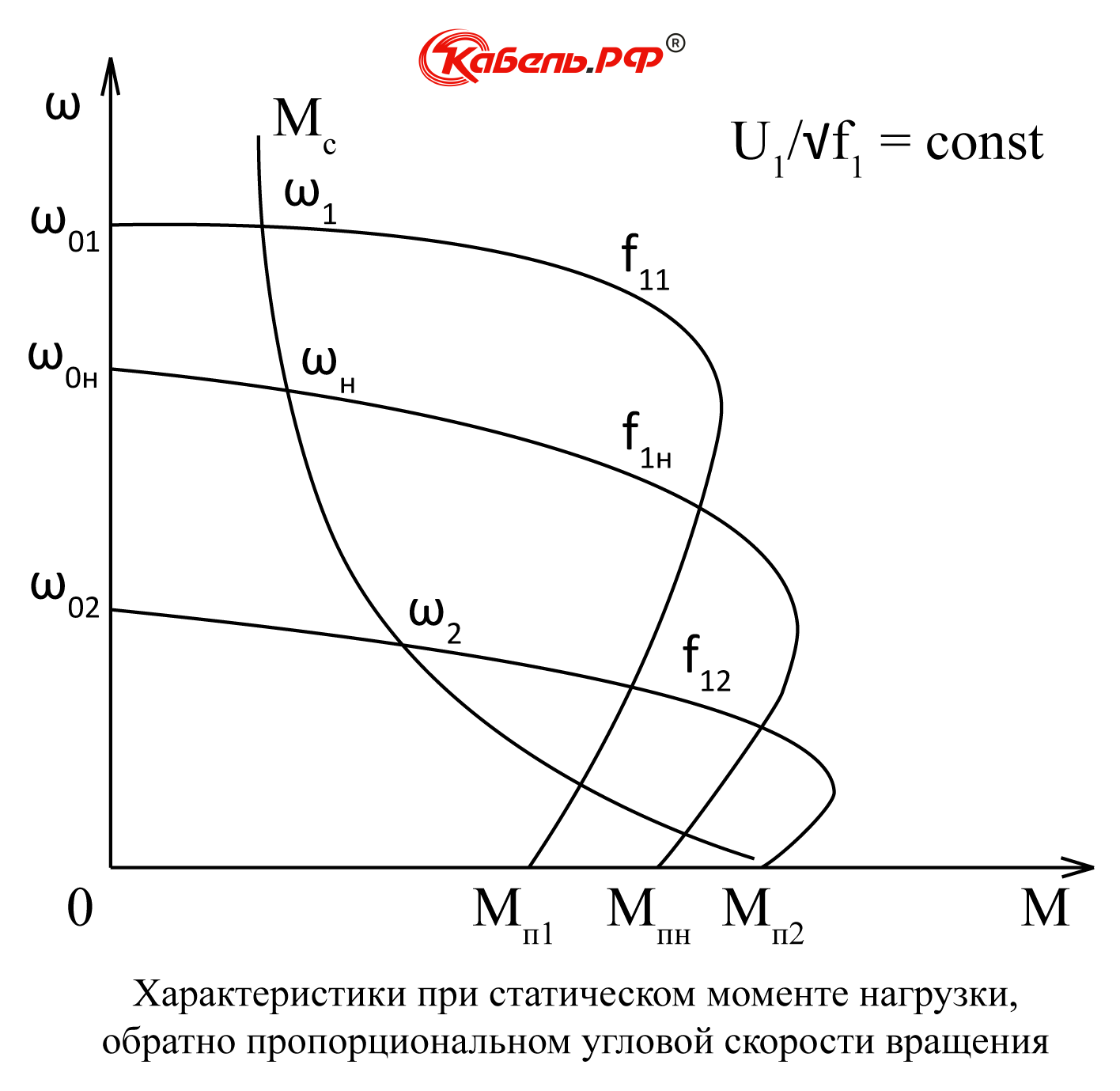
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ.
Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором).
Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
- обширный диапазон регулировки;
- «жесткость» механических характеристик;
- минимум потерь «скольжения», мощности.
Недостаток - высокая стоимость (в последние годы становится менее актуально).
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором.
Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки.
Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
- экономичность;
- «жёсткие» механические характеристики.
Недостатки:
- ограниченное количество возможных скоростей;
- ступенчатость переключения скоростей.
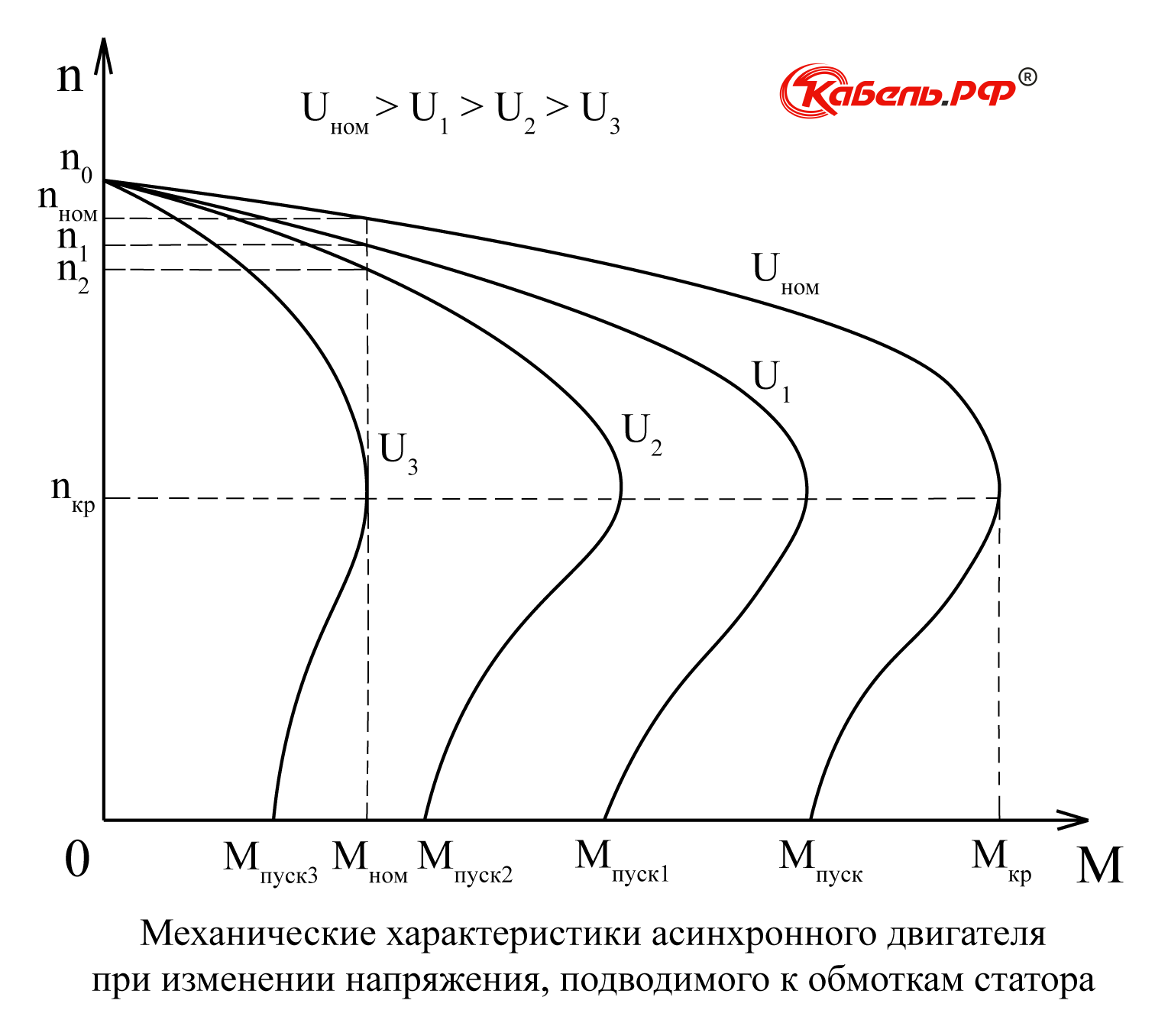
Изменение питающего напряжения
Применение: асинхронные двигатели.
Изменять напряжение на статоре можно, включая в его цепь резисторы (старый и неэкономичный способ), автотрансформаторы или тиристорные регуляторы.
При регулировании скорости изменением напряжения, критический момент пропорционален квадрату подводимого напряжения. Снижается устойчивость к кратковременным перегрузкам и КПД, поэтому метод предпочтителен при «вентиляторной» нагрузке. Еще один недостаток - малый диапазон регулирования.
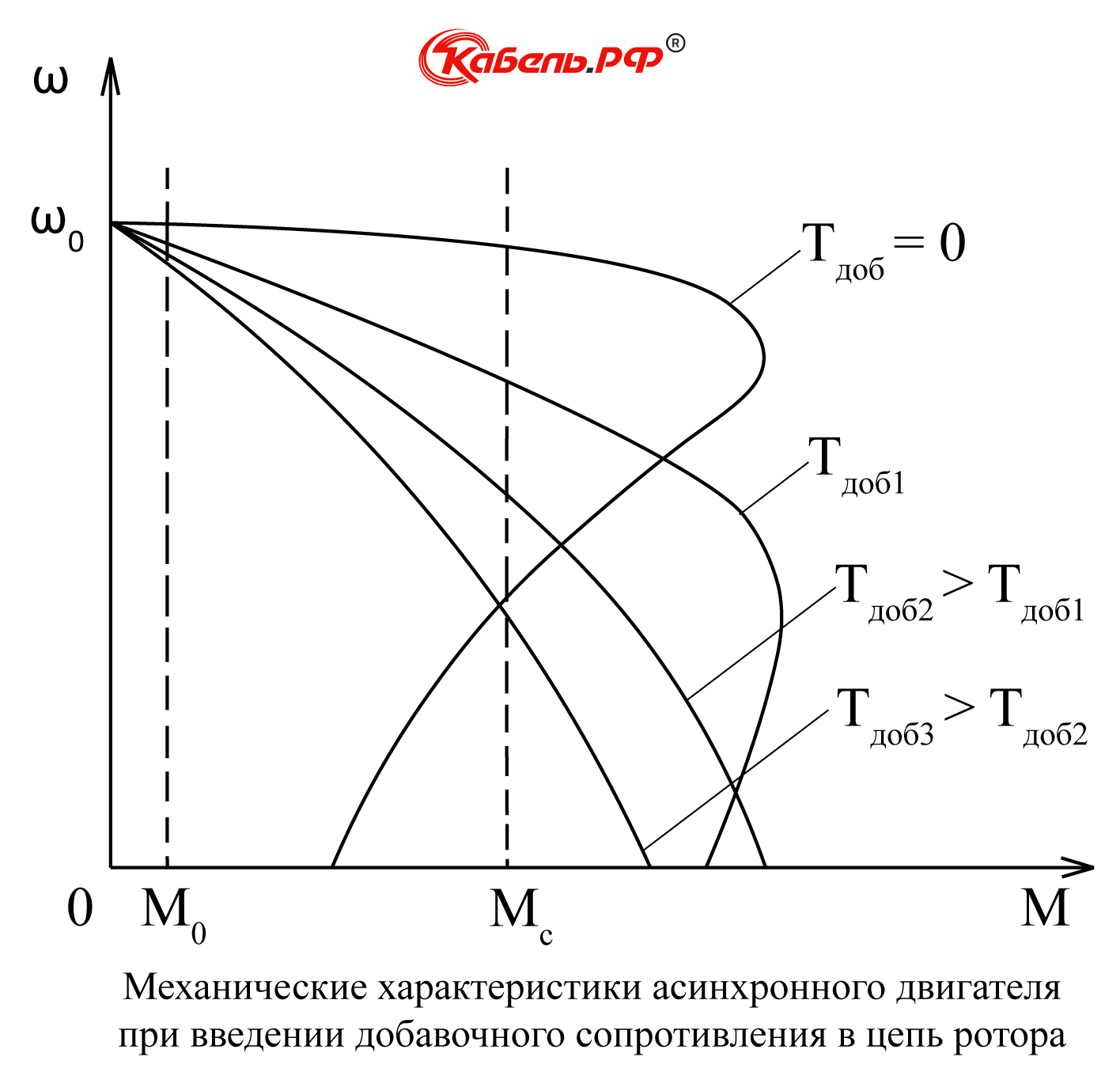
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором.
При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
- простота реализации;
- критический момент = const;
Недостатки:
- большие потери (при изменении скорости половина мощности тратится на выделение тепла);
- малый диапазон;
- «мягкие» механические характеристики.
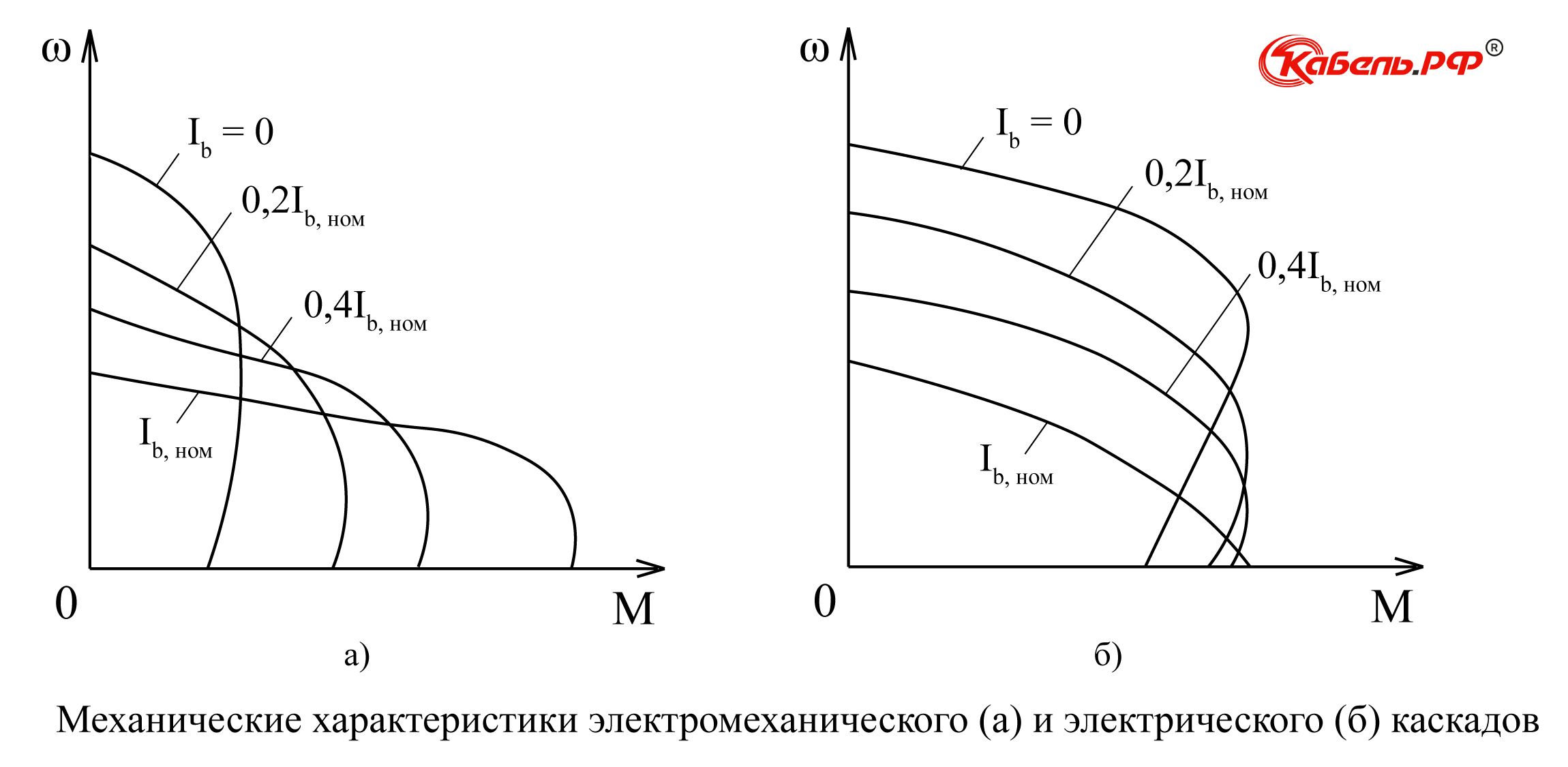
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Смысл регулирования каскадными схемами заключается в подаче в цепь ротора добавочной ЭДС. Изменяя добавочную ЭДС ротора, мы изменяем ток ротора, а значит его момент и скорость. Создать добавочную ЭДС, помимо устройства вентильного каскада, может и ДПТ - машинно-вентильный каскад.
Достоинства:
- Минимум сопутствующей силовой и контактной аппаратуры;
- плавность регулировок;
- малая мощность управления.
Недостатки:
- стоимость;
- низкий коэффициент мощности;
- плохая устойчивость к перегрузкам.
Изменение напряжения питания якоря
Применение: любые ДПТ.
Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
- плавность регулировок;
- простота пусков и торможений;
- экономичность.
Недостатки:
- необходимость трехкратного преобразования энергии→низкий КПД;
- три электрические машины в системе;
- дорогая эксплуатация.
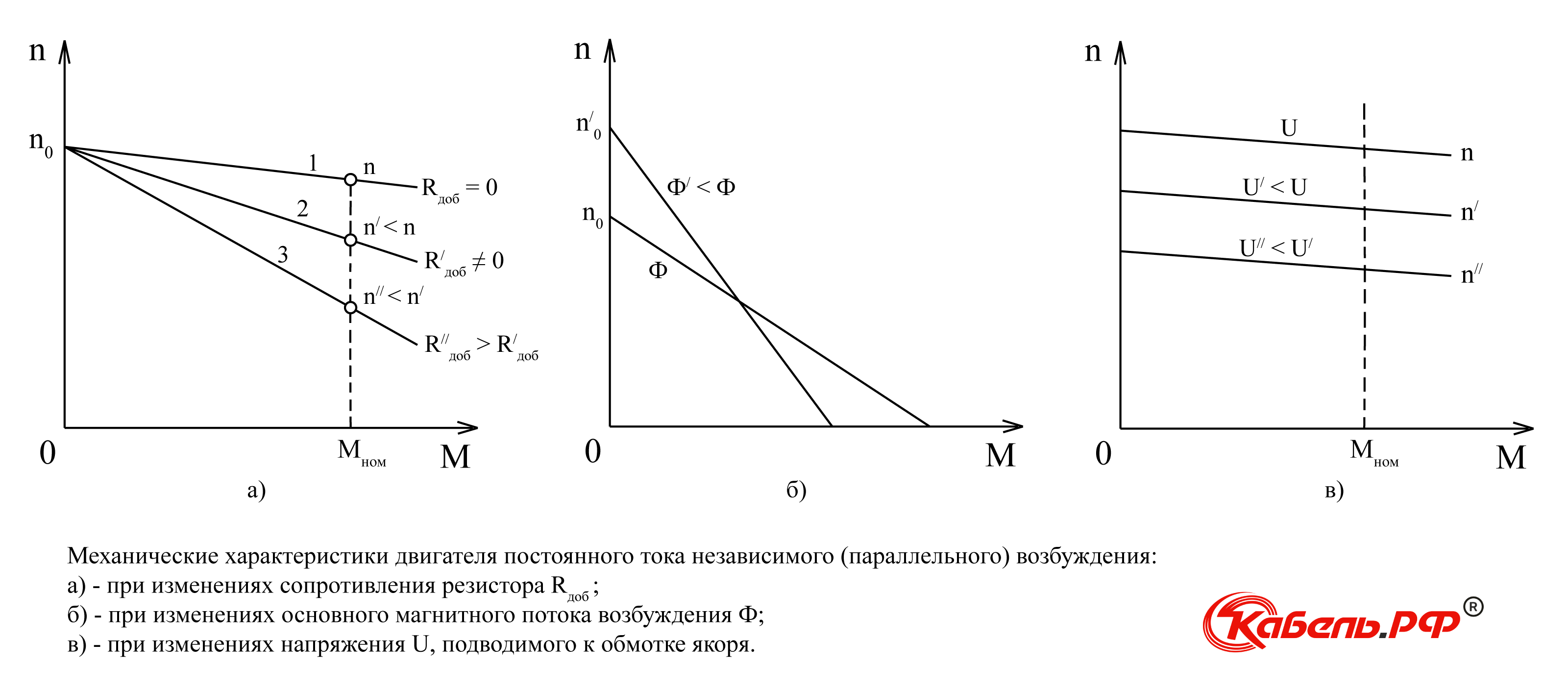
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Преимущества:
- минимальные потери→экономичность;
- широкий диапазон регулирования
Недостатки:
- невозможно бесконечно уменьшать ток в обмотке возбуждения, двигатель уйдет «в разнос».
Для оформления заказа позвоните менеджерам компании Кабель.РФ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту zakaz@cable.ru с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.